摘 要:主要介紹滾筒式
拋丸機自動(dòng)裝卸系統的上料系統的工作原理、卸料機構的基本組成及控帝J原理、液壓驅動(dòng)系統原理、可編程邏輯控制器的邏輯控制原理。滾筒式拋丸機自動(dòng)裝卸系統是一種機電液一體化的機器。它能為降低勞動(dòng)強度發(fā)揮應有的作用。
關(guān)鍵詞:拋丸機; 自動(dòng)裝卸系統;可編程邏輯控制器
0 前言
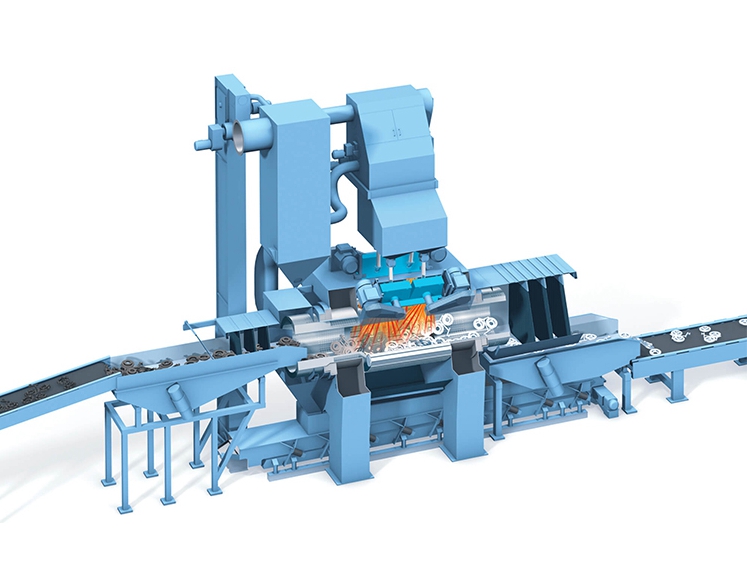
利用Q31101滾筒式
拋丸清理機可清理鍛件的氧化鐵皮,同時(shí)提高鍛件的表面質(zhì)量。由于鍛件的批量生產(chǎn),使用人工操作,勞動(dòng)量大,工人難以承受,同時(shí)也影響了生產(chǎn)效率,勢必需用一種機械來(lái)代替。
1 拋丸機裝卸機構的設計
(1)拋丸機裝料機構的設計
拋丸機裝料機構由以下部分組成:左右上料油缸、料斗架、料斗及連桿機構,簡(jiǎn)化的運動(dòng)簡(jiǎn)圖如圖I所示。該機構的工作原理:在裝料初始時(shí),左右液壓缸以相同速度同時(shí)工作,待料斗到達位置口時(shí),右液壓缸下降,致使料斗至位置c,然后右液壓缸上升,同時(shí)左液壓缸下降,使料斗以D—E一,一c— 順序進(jìn)行工作,較后回到位置B ,由左右液壓缸同時(shí)下降回到原位,整個(gè)工作過(guò)程完成。

圖1、上料機構簡(jiǎn)圖
(2)拋丸機卸料機構的設計
工作裝置由以下部分組成:動(dòng)臂、斗桿、鏟斗、動(dòng)臂油缸、斗桿油缸、鏟斗油缸及連桿機構,簡(jiǎn)化的計算圖如圖2所示。

圖2、簡(jiǎn)化計算圖
在機座建立坐標系蜀x0y0 z0,在動(dòng)臂上建立動(dòng)態(tài)坐標系 x1yl z1在斗桿上建立動(dòng)態(tài)坐標系
X2y2 z2,在鏟斗上建立動(dòng)態(tài)坐標系 x3y3z3;z1z2z3。 軸通過(guò)各回轉副的軸線(xiàn),方向符合右手定則,則各機構的旋轉矩陣為

齊次變換矩陣為

式中 Ry——坐標系X1Y1Z1與坐標系X1Y1Z1的旋轉變換矩陣;
Ty-----坐標系X1Y1Z1與坐標系X1Y1Z1的旋轉變換矩陣;
L1—— 坐標系與原點(diǎn)之間距離。
拋丸機卸料機構工作時(shí),油缸的瞬時(shí)長(cháng)度可以求出,則可以求得a。,a:,a,,由姿態(tài)角和油缸長(cháng)度可以確定工作裝置的姿態(tài)(位置和姿態(tài))。
2 液壓驅動(dòng)裝置的設計
拋丸機自動(dòng)裝卸料機構的動(dòng)力源主要是液體壓力提供的,拋丸機自動(dòng)裝卸料系統的液壓驅動(dòng)系統簡(jiǎn)圖如圖3所示。

圖3、自動(dòng)裝卸系統液壓簡(jiǎn)圖
1.油箱2.濾油器3.油泵4.三位四通閥5.調速閥6.油缸7.溢流閥
A.上料左右液壓缸 B.卸料動(dòng)臂油缸、斗桿油缸、鏟斗油缸
為了設計方便,把上料左右液壓缸、卸料動(dòng)臂油缸、斗桿油缸、鏟斗油缸的液壓驅動(dòng)系統設計為相同油路。自動(dòng)裝卸系統液壓驅動(dòng)系統的原理:
(1)液壓缸進(jìn)給:液壓油由油箱一濾油器一油泵一三位四通閥左位一調速閥一油缸左腔,液壓缸右腔的油流回油箱。
(2)液壓缸后退:液壓油由油箱一濾油器一油泵一三位四通閥右位一調速閻一油缸左腔,液壓缸左腔的油流回油箱。當把三位四通閥打到中位時(shí),液壓缸停止運動(dòng)。只要靈活地控制三位四通閥的3個(gè)位置,就能夠達到設計目的。
3 控制系統軟件設計
滾筒式拋丸機自動(dòng)裝卸系統控制系統采用可靠性很強的可控制編程器為核心,對整個(gè)系統進(jìn)行控制,可控制編程器的程序設計采用結構簡(jiǎn)單、直觀(guān)、方便的梯形圖進(jìn)行,程序的設計方案,主要根據控制系統流程圖(見(jiàn)圖4)及控制系統主要功能實(shí)現的。

圖4、控制系統流程圖
4 結語(yǔ)
滾筒式拋丸機自動(dòng)裝卸系統的設計,提高了加工效率,也降低了工人的勞動(dòng)強度,具有一定的經(jīng)濟效益和社會(huì )效益。
家_拋丸清理機_吊鉤,通過(guò)式拋丸機-青島青工機械有限公司")

 魯公網(wǎng)安備 37021102001299號
魯公網(wǎng)安備 37021102001299號